
POINCARE Mobile Imaging Laser Scanner
Back in 2019, the Realsee team joined forces with LEAPX for the design and development of the GALOIS, a Terrestrial laser scanner (TLS). This product quickly established itself as an industry standard and garnered significant praise within the sector over the past few years. Fast forward to May 2022, with the rising demand for scanning solutions, the Realsee team extended an invitation to collaborate once more with the LEAPX team to create a mobile scanning device.
From the start, LEAPX took the lead in shaping the product's architecture. Through thoughtful layout design, POINCARE ultimately incorporated multiple SLAM technologies. The seamless collaboration between LiDAR and cameras, combined with the powerful software algorithm support from Realsee, positions POINCARE as the pioneering laser scanning device in the industry, capable of producing full-view, color point clouds directly within the device.
Strategy|Industrial Design|Visualisation




Mobile scanners must remain in constant motion to handle the ever-changing demands of the scanning environment. Designing a professional scanning device that is lightweight, flexible, high-performing, comfortable to hold, and adaptable to various carrying platforms presents a significant design challenge for the LEAPX team.
Before starting the design work, LEAPX team conducted expert interviews and immersed themselves in the market by personally using various scanning devices, all with the aim of collecting user feedback and requirements. Furthermore, they drew inspiration for architectural design from professional handheld photography equipment in other industries.

The biggest complaint users have about existing mobile scanning devices is that they are too heavy, leading to severe muscle fatigue from prolonged use. On the other hand, wearable devices, while solving this issue, are often too bulky, lack flexibility, and are difficult to carry for on-the-go work.
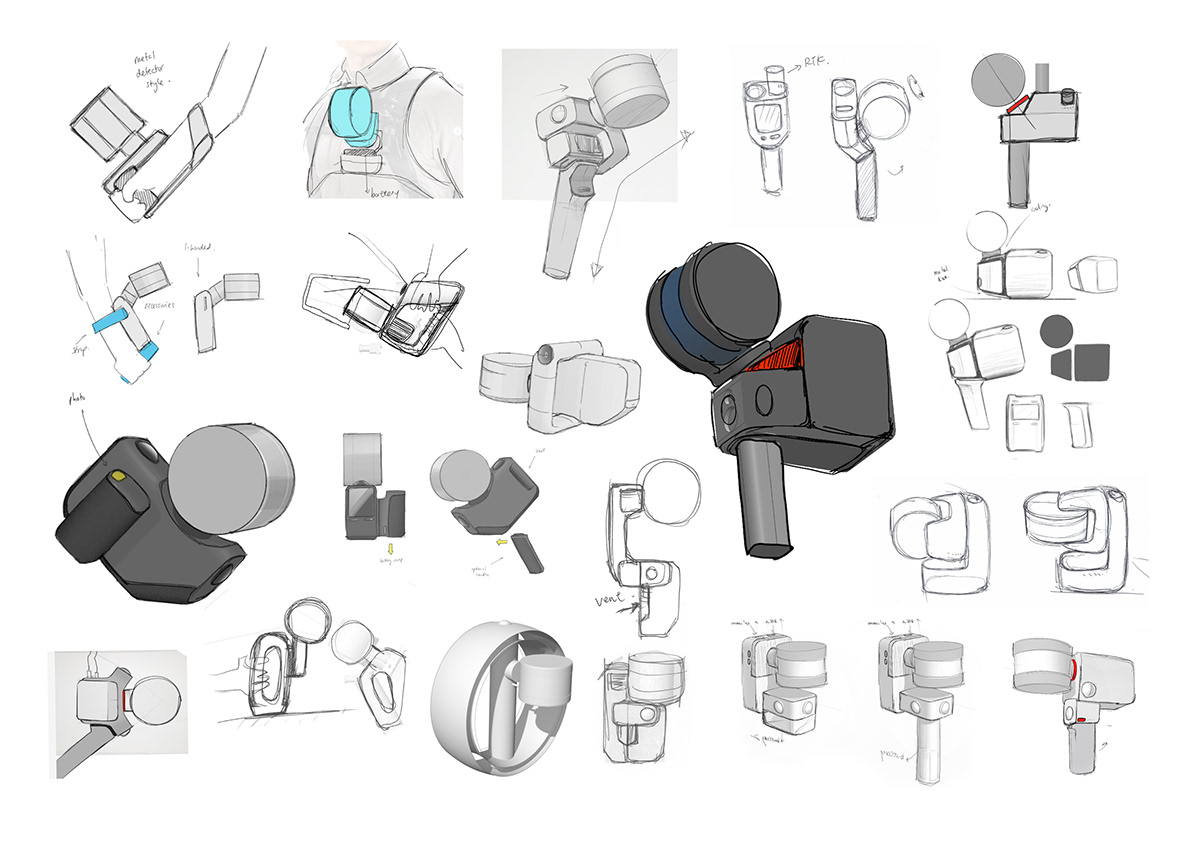
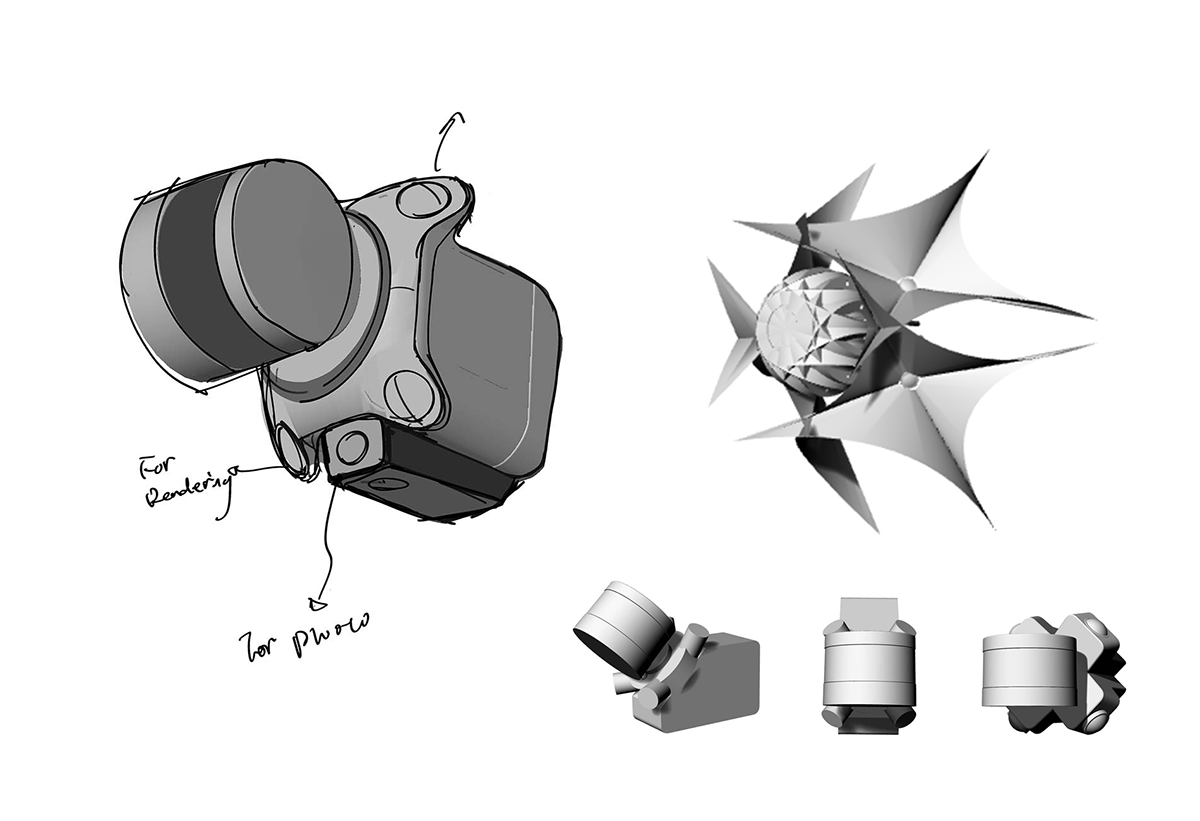
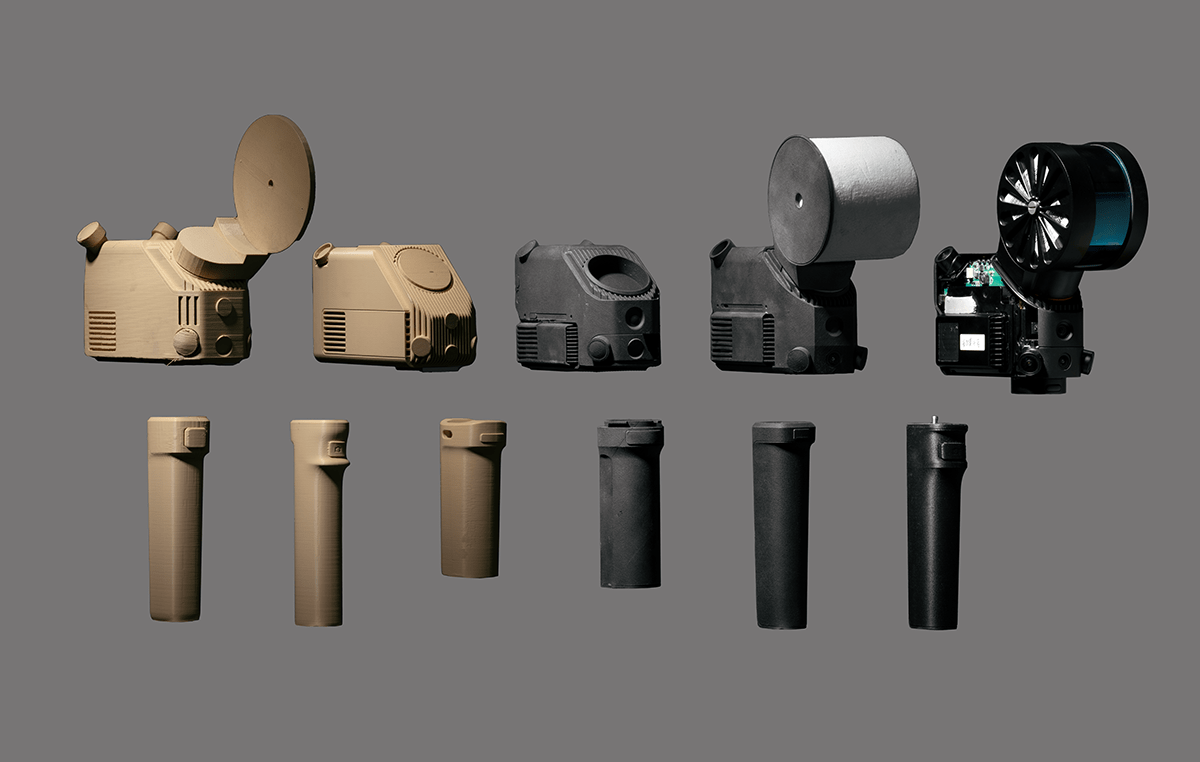
In the early stages of the project, the LEAPX design team examined diverse form and structure, in our quest for solving problems in each dimension, such as portability, grip experience, and maximizing scanning performance.


For example, a foldable handle can reduce the device's size, making it easier to carry.Placing the camera module under the handle not only reduces FOV (Field of View) interference but also achieves optimal weight balance.
In addition to simulation with digital models, we also utilize 3D printed parts and aluminum parts to build different frameworks to conduct balance testing with weights to simulate the actual grip balance and feel.

The battery and camera are located at the bottom for a balanced weight distribution.

The foldable handle is positioned beneath the center of gravity of the device, ensuring front-to-back balance.

The handle is positioned in the center, providing front-to-back balance.

Gripping with both hands is more ergonomic and requires less exertion.
In a compact body, the camera's FOV is easily obstructed by the LiDAR in front. How to ensure that the LiDAR and camera FOV do not interfere with each other, and how to distribute components such as the screen, battery, internal processor, SSD, etc.,properly, while maintaining a compact composition, has become the design challenge for the next design phase.

First, we tilted the LiDAR upwards by 30°, then, we tried to position 2-3 cameras at the front and top, but we found that there were still blind zone on both sides.
So we proposed to arrange 4 cameras around the LiDAR, which could eliminate blind zone on the left and right, but it couldn't effectively avoid the LiDAR's cone-shaped blind zone in the front.

The orange area represents the camera's field of view (FOV), and the white area represents the blind spot of the field of view angle.
We made adjustments by relocating the front-facing camera to the bottom of the device and shifting the top camera towards the rear edge. This configuration allowed the cameras to be positioned as far away from the LiDAR as possible, maximizing the effective camera field of view.
After realising the essential scanning functionality, we need to continue considering ergonomic design issues.
Through user interviews, we learned that scanning work often lasts for 4-5 hours, and prolonged handheld use leads to significant muscle fatigue. Given the performance requirements, the weight of components such as the camera and LiDAR cannot be eliminated entirely. Therefore, in addition to efforts to reduce weight in the device's body, the design of the grip experience is crucial.
Through user interviews, we learned that scanning work often lasts for 4-5 hours and causes the significant muscle fatigue. Because of performance requirements, the weight of components such as the camera and LiDAR cannot be eliminated. Therefore, it is crucial to design the device with a good handling experience.
We observed that users tend to switch between their left and right hands during work to reduce muscle fatigue from prolonged single-handed use. Therefore, a symmetrical handle design is preferred. In order to avoid interfering with the FOV the handle is positioned beneath the body. During the design process, we used 3D printed models for rapid verification of body volume, button position, and handle feel.
At the same time, the handle also serves as an extendable pole, making it convenient for users to scan higher objects, such as the tops of cabinets in a room. The tripod at the bottom allows the device to be placed steadily for calibration.

LEAPX team has also designed shoulder-support accessories that free up the user's hands, allowing the weight of the device to be borne by the waist and shoulders, significantly reducing arm fatigue. The supporting structure uses aluminum alloy materials, making the wearing process clear, quick, and stable. The foldable design also makes it convenient for users to transport.



Traditional soft straps require frequent adjustments to ensure a snug fit against the body. In contrast, the POINCARE shoulder accessory securely fastens the device with just three key points - both shoulders and the waist - effectively distributing the weight onto the shoulders and hips.
1.Users have the flexibility to choose their preferred wearing method based on task duration. A waist belt combined with handheld mode is suitable for short tasks, soft shoulder straps are designed for medium-duration work, and for long-lasting assignments, the foldable shoulder harness is recommended.
2.To accommodate individuals of varying heights, the device and the attachment point of the waist belt can be vertically adjusted by 10cm, covering 2.5% to 97.5% of normal distribution of male height.
3.The waist and shoulder accessories can be detached separately, allowing users to swiftly remove the device for scanning under tables or above cabinets. This feature also facilitates both workers and the device safely navigating through certain special scenarios (such as fire scenes or confined spaces).

Installed on the vehicle, robot dogs or drones.





CNC-machined aluminum alloy casing, which is lightweight and durable.


An external tripod can be attached to the bottom of POINCARE.

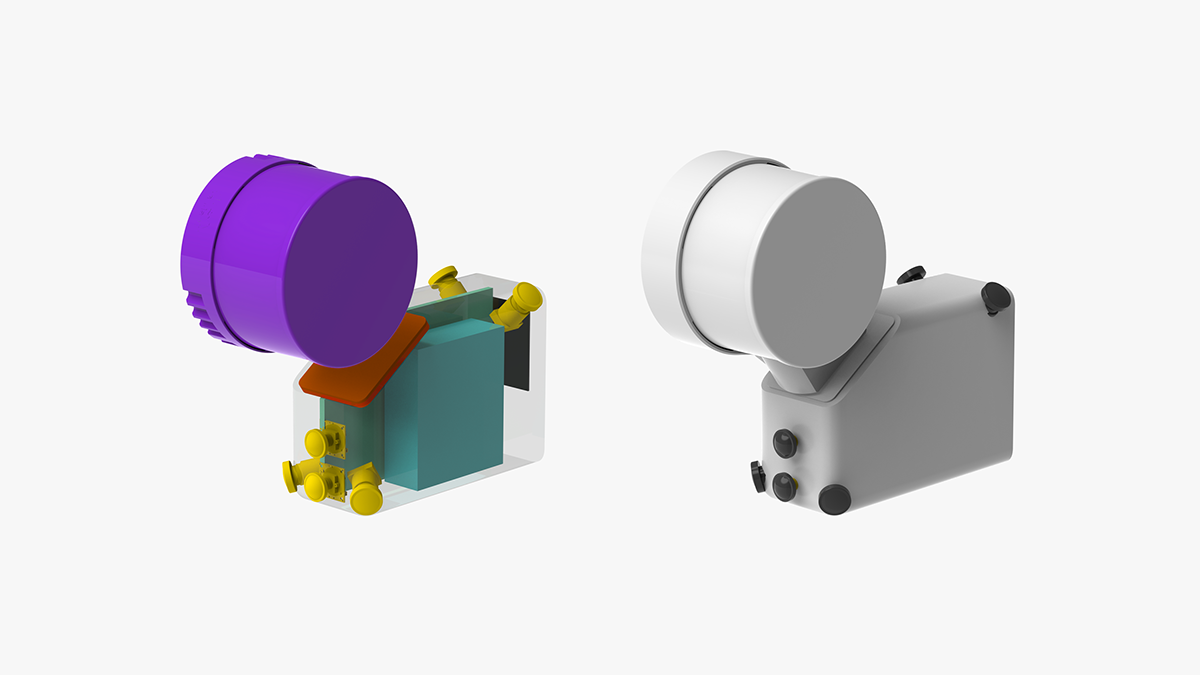
The battery is located in the middle of the body, with the PCB board distributed on the left and right sides. The internal space is compact, ensuring a balanced weight distribution on both sides and a stable structure.
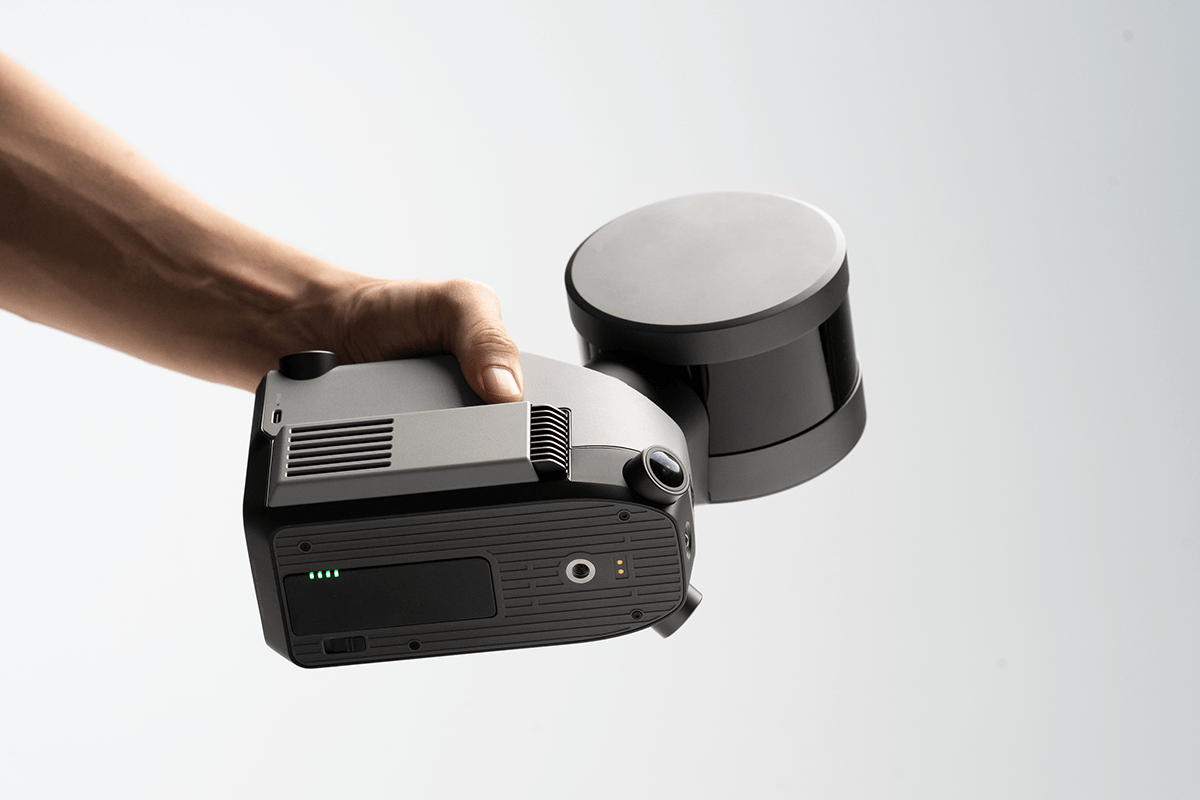
The battery is installed from the bottom.

The handle is securely attached to the bottom via quick-release mechanisms, positioning it directly beneath the center of gravity of the device's body.

Using the handle buttons can capture scene details.

Through precise calculations, we have accurately positioned the handle directly beneath the center of gravity of the device, achieving front-to-back balance and enhancing hold comfort.The product can also stand upright on a tabletop when utilizing the handle, exemplifying its well-balanced design

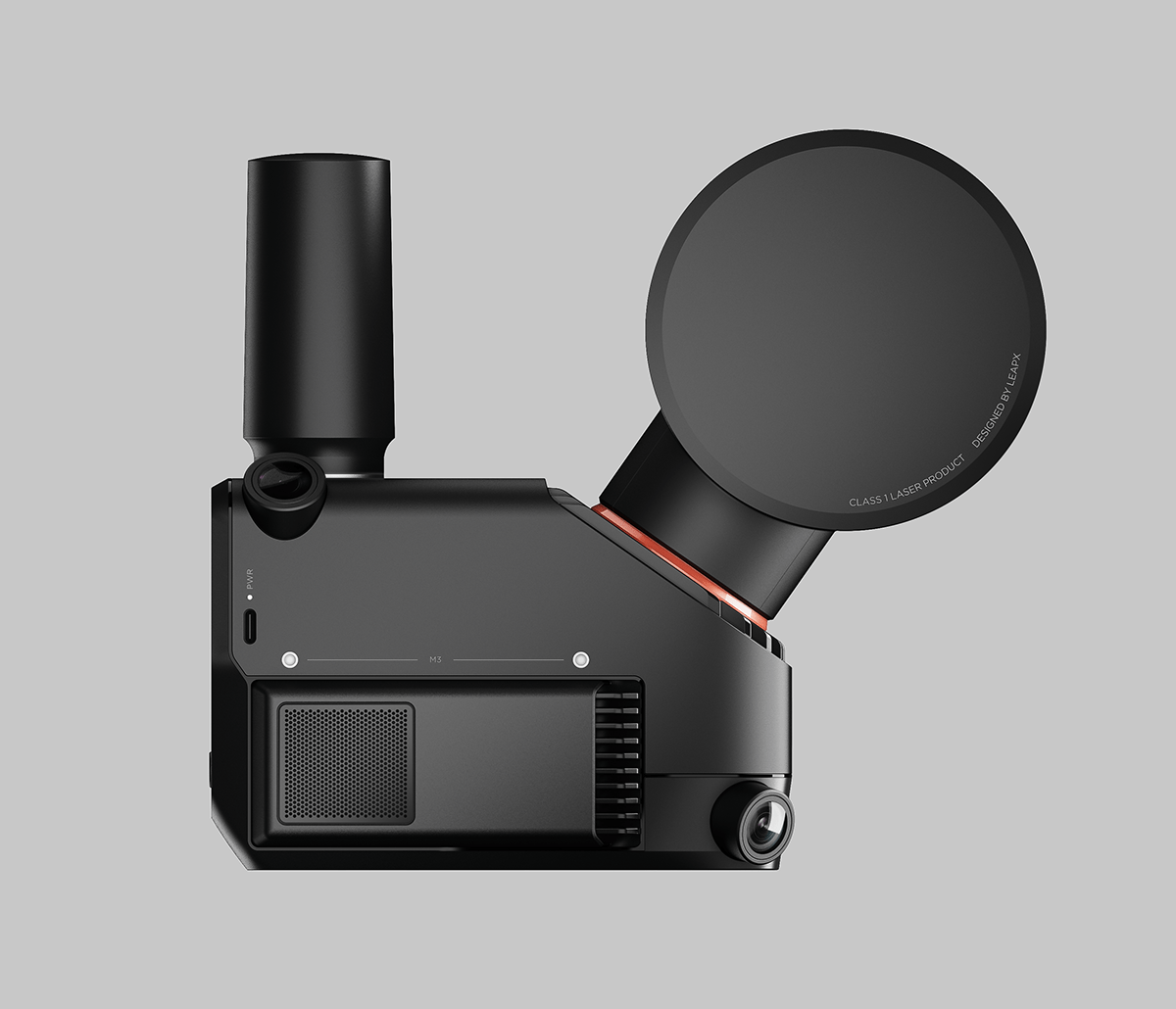
POINCARE is equipped with a 16-channel LiDAR. By the active motor rotating 360°, it creates a super-wide field of view of 360° x 270°.

Four 12MP ultra-wide-angle cameras are arranged around the LiDAR, working together to avoid the conical blind zone in front created by the rotating LiDAR. They provide unobstructed and true-color rendering of spatial point clouds.

The 12MP high-definition camera at the front can quickly capture close-ups of key scenes, record scene details and location information. Additionally, at the bottom, there is a 60Hz SLAM camera that enhances the device's ability to precisely recognize spatial point clouds, particularly in low-light conditions.
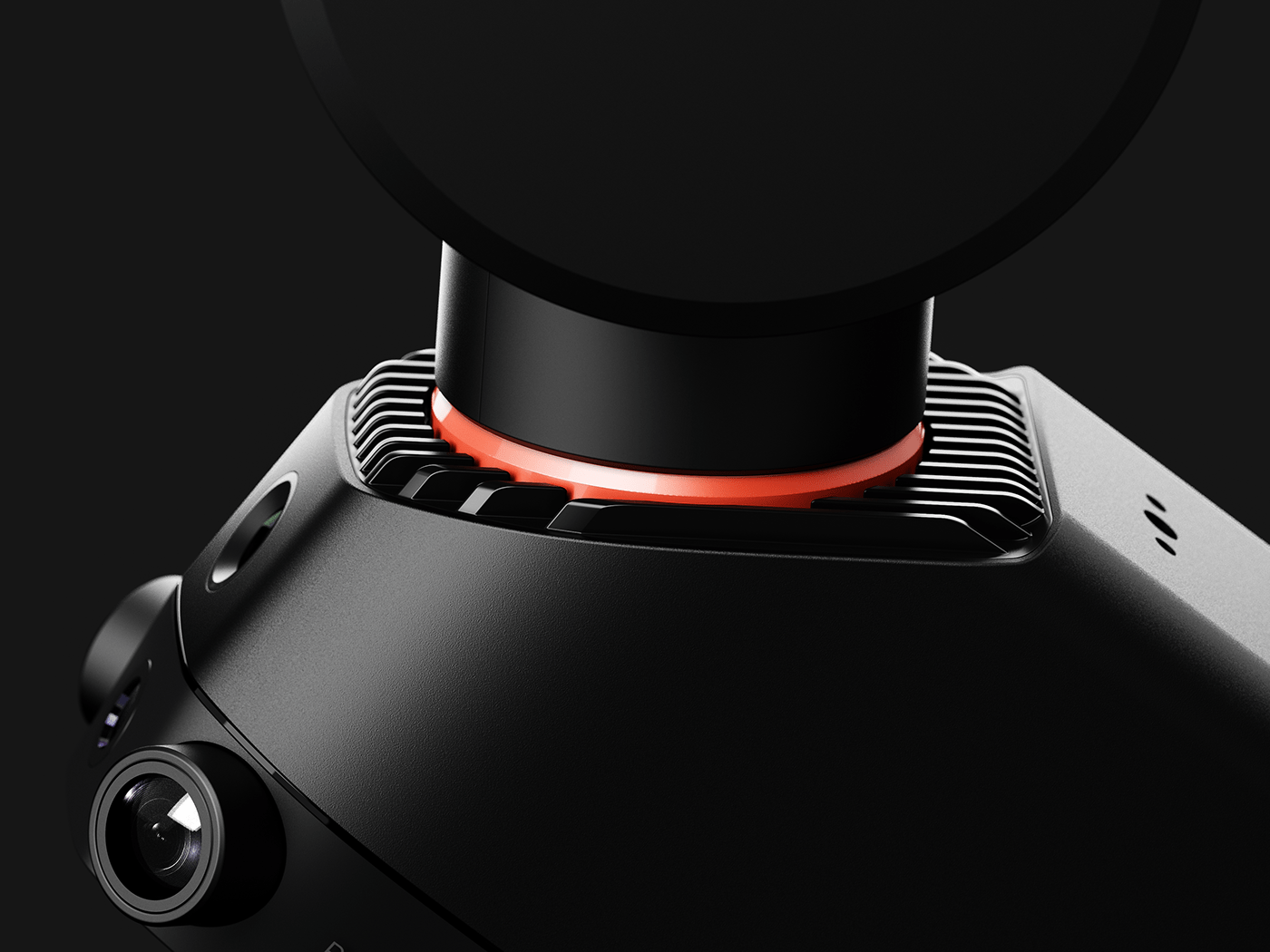
Heat sinks surround the LiDAR drive motor to improve heat dissipation.

Internal heat is conducted to the external heat sink, and then cooled by fans, to ensure dust and water resistance of the device (there are no vents that lead into the device).

Buttons and the display screen face the user for easier operating.

The RTK module can be installed on the top quick-release connector, enhancing the device's positioning accuracy.


REALSEE hosted the POINCARE product launch event on September 4th. The birth of POINCARE makes it possible to have seamless integration with Realsee's professional-grade data collection product GALOIS and other hardware products, leading to build a more comprehensive and flexible spatial data collection solution.


Design Team
Kaihuang Chen, Yumian Deng, Barney Mason, Feng Wei,
Caijin Chen, Tianrui Xie, Yusen Wang
Client
Realsee


